SigFit’s line-of-sight error capability predicts the line-of-sight error of an optical system due to static or dynamic disturbances.
The user specifies a starting ray with which SigFit calculates line-of-sight sensitivities for the rigid body motions of all optical surfaces in the system including an image plane. Line-of-sight error quantities are computed in image space and object space using linear superposition of the computed sensitivities. Analysis may be applied to static disturbances or vibrational disturbances.
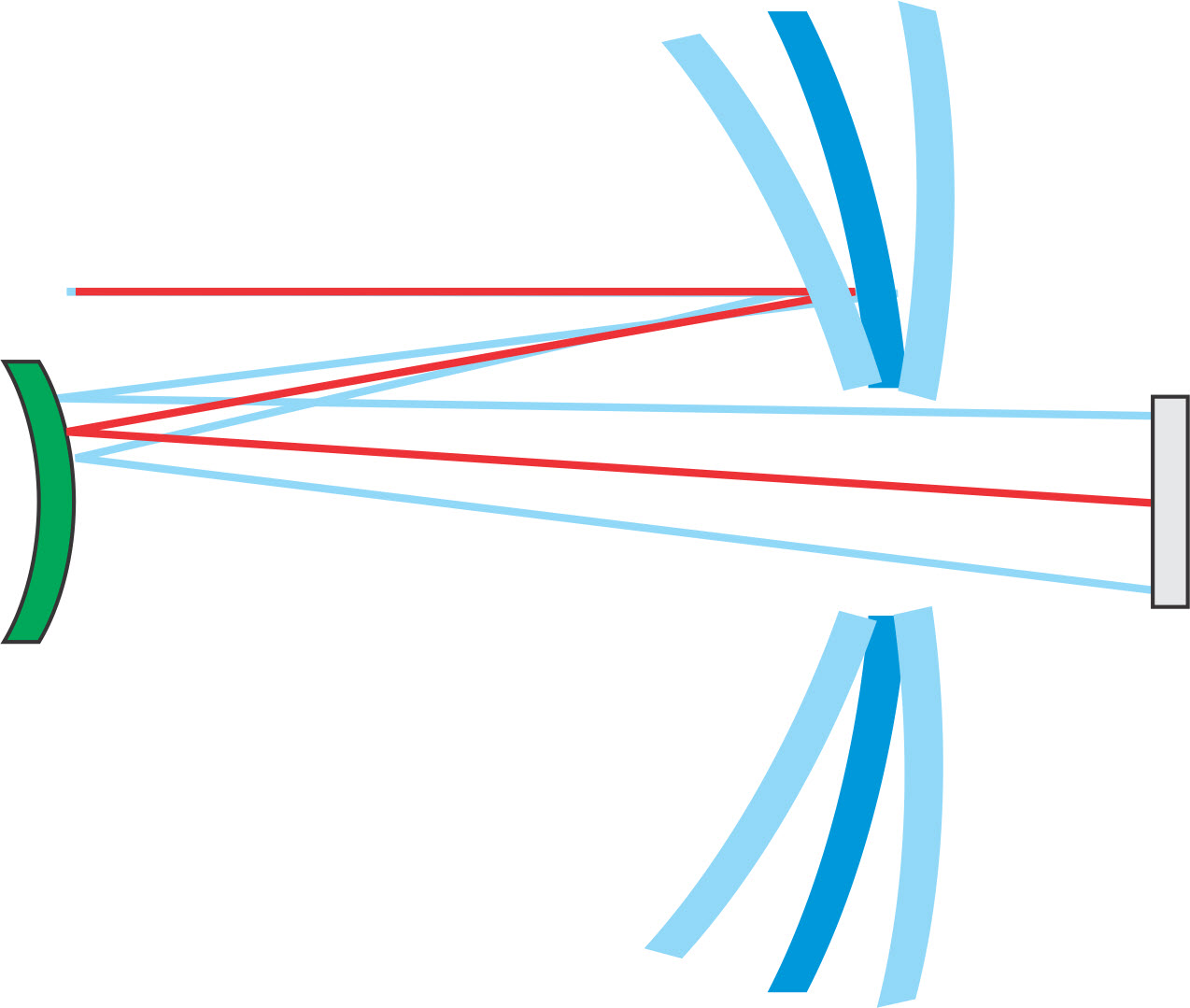
Figure 1 – Static or dynamic motions of optical surfaces causes system level line-of-sight errors.
Decomposition of Drift and Jitter Line-of-Sight Error
SigFit can decompose line-of-sight error into drift and jitter components if an integration time is specified. The drift component of line-of-sight error results in a position error in the image while the jitter component results in a degredation in image quality.
Table 1 – Drift Line-of-Sight Error Results Summary
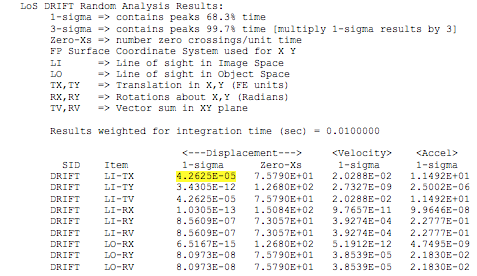
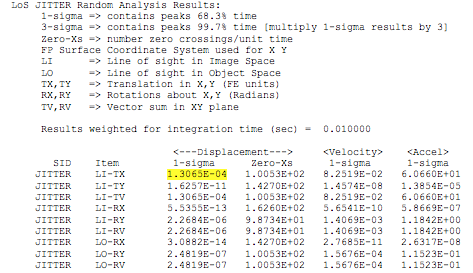
Table 2 – Jitter Line-of-Sight Error Results Summary
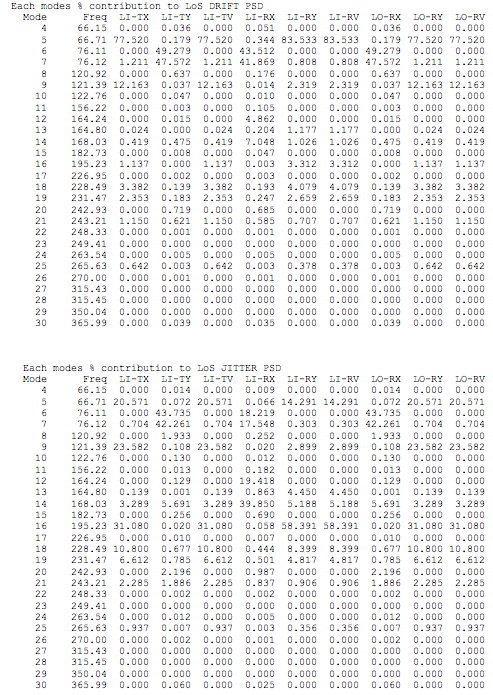
SigFit also computes the percent modal contributions to the line-of-sight error PSD predictions as shown in Table . This allows the user to identify which modes to consider when contemplating performance enhancing design changes.
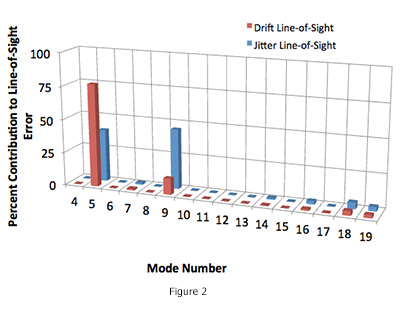
Figure 2 – Percent Modal Contribution Plot of Line-of-Sight Error
Table 3 – Drift Line-of-Sight Error Results Summary
Change in MTF due to Jitter Line-of-Sight Error
SigFit can compute the change in optical modulation transfer function (MTF) due to the jitter component of line-of-sight error.
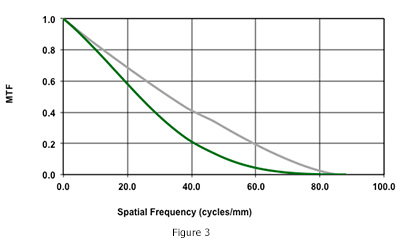
Figure 3 – Change in MTF due to Jitter Line-of-Sight Error
Line-of-Sight Error Equation Generation
The line-of-sight sensitivities may also be used in SigFit’s design optimization support feature to generate equations of line-of-sight error using multipoint constraint equations. These equations may be formatted for use in MSC Nastran, NX Nastran, NEi Nastran, and ANSYS Mechanical APDL to predict line-of-sight error within a finite element analysis. This capability is especially useful in design optimization allowing users to minimize or constrain the line-of-sight error during an optimization analysis. For example, if a design is already meeting a line-of-sight performance requirement, then the line-of-sight error could be constrained while the weight is minimized. If the line-of-sight performance prediction is not meeting the requirement , then the line-of-sight error could be minimized as the objective in order to find a design that meets the requirement.